Flight Controller
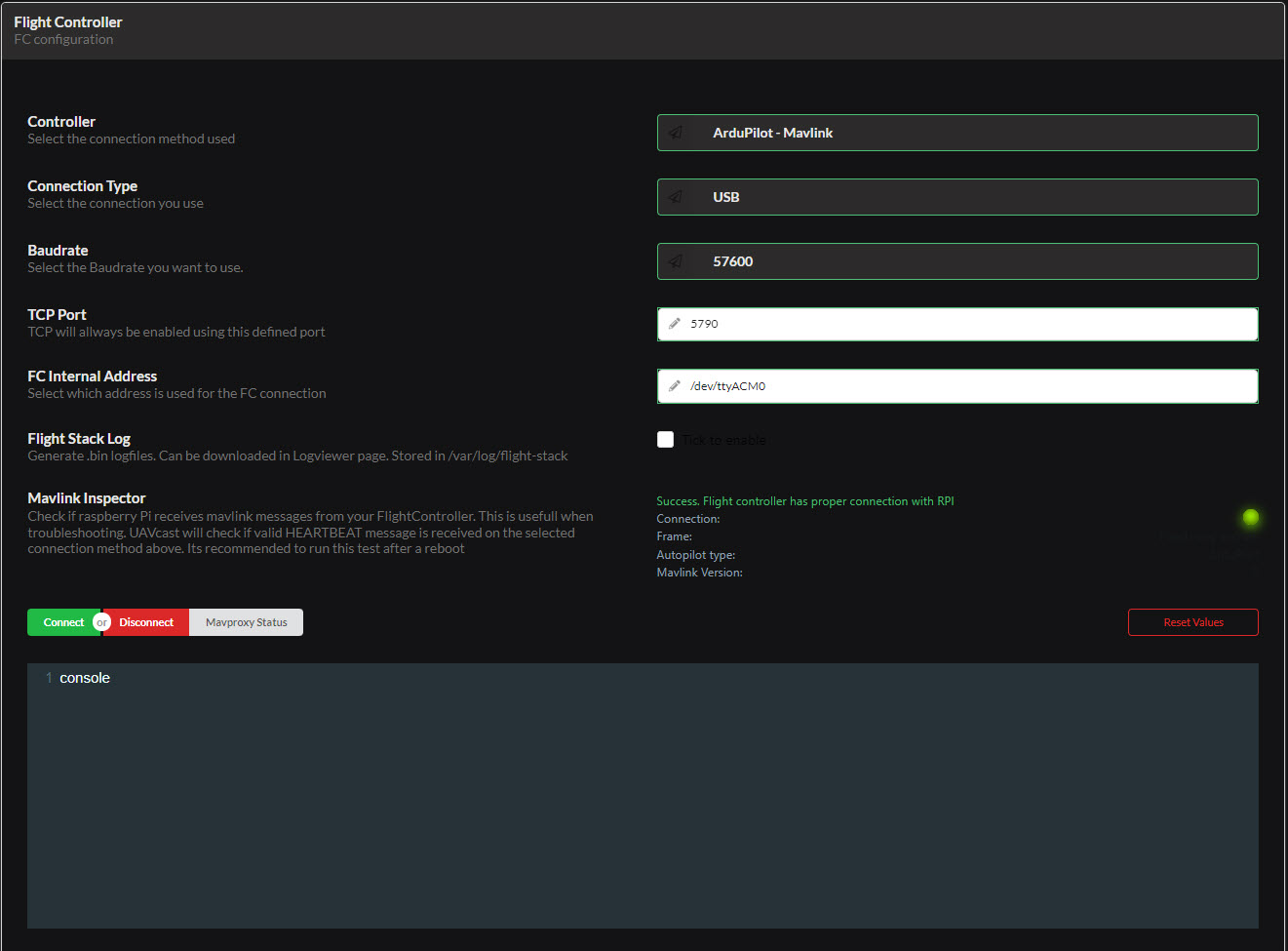
Configure the connection between Raspberry and the Flight Controller.
Controller Type¶
- Default value:
None - Options:
Ardupilot, Navio
Choose the board you want to use. for Pixhawk, APM, Cube or other Ardupilot variants select Ardupilot.
Vehicle (Navio Only)¶
- Options:
ArduPlane, ArduRover, ArduCopter
Select the binary you want use.
Connection Method¶
- Options:
USB, GPIO
Select the communcation method you use
Baud rate¶
- Default value:
57600 - Options:
9600, 57600, 115200
Select a baud rate you want to use for the telemetry stream.
Protocol¶
- Default value:
TCP - Options:
TCP, UDP
Select the protocol you want to use for the telemetry stream.
FC Internal Address¶
- Default value: USB
/dev/ttyACM0, GPIO:/dev/ttyAMA0
This is the internal address raspberry uses for communication with Flight Controller. Only change if you know what you are doing!
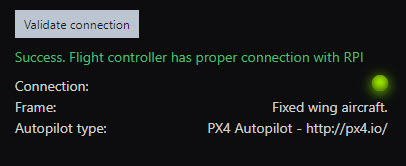
Validate Mavlink Connection¶
Check if raspberry Pi receives mavlink messages from your FlightController. This is usefull when troubleshooting. UAVcast will check if valid HEARTBEAT message is received on the selected connection method above. Its recommended to run this test after a reboot
Success¶
Failed¶